Create a small robot which will function to collect data in GPS denied environments such as caves. Timeline: Five weeks
This bot runs on an Arduino and a 9V battery to collect data through a gyroscope which could hypothetically map a disaster site or cave network. It is low cost, allowing it to be abandoned if recovery poses any risk. The fins on the side, along with the hollow body, allow the bot to roll and "swim" across the top of water, making it amphibious.

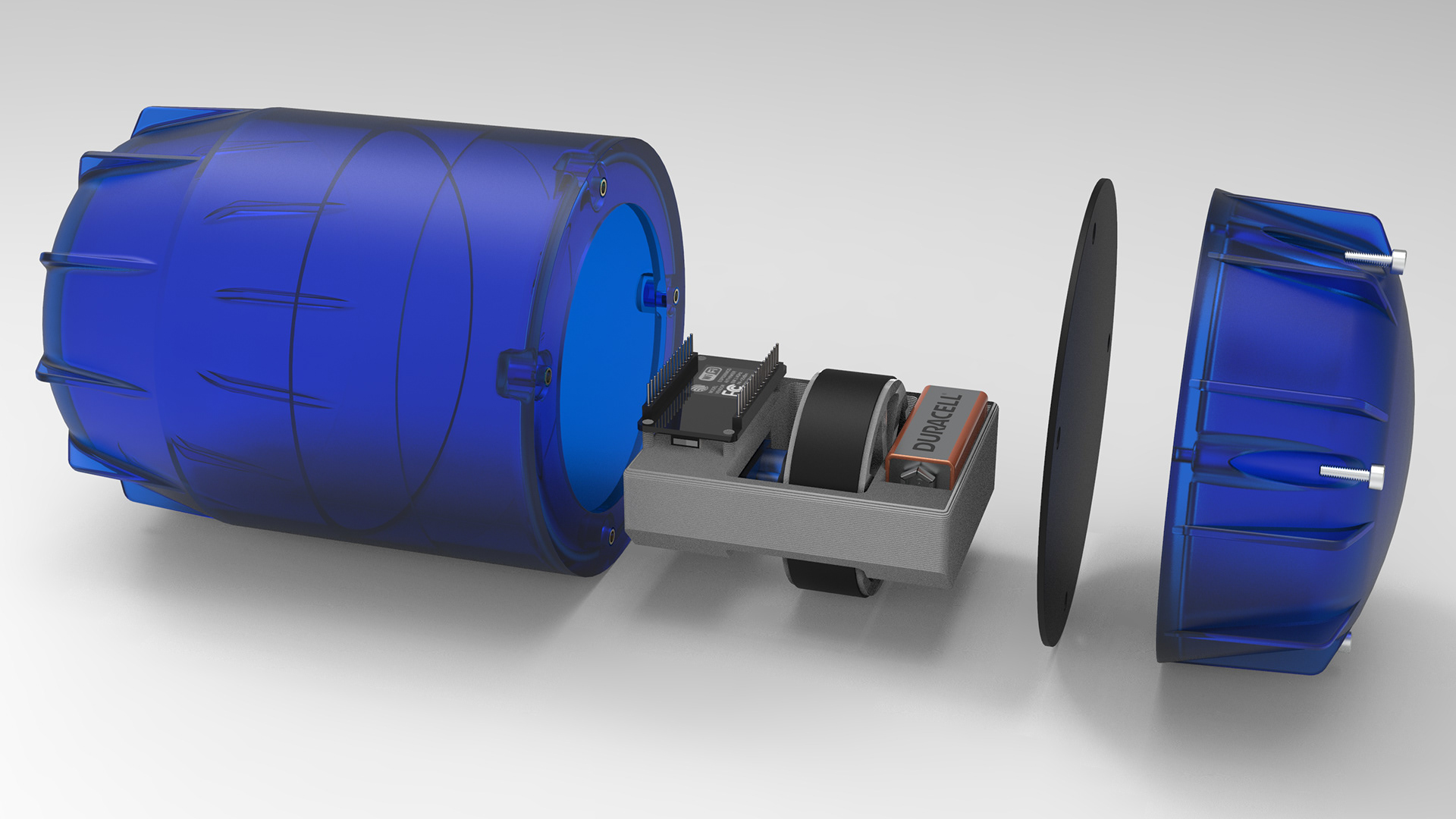
Exploded view modeled in SolidWorks and rendered in KeyShot 8
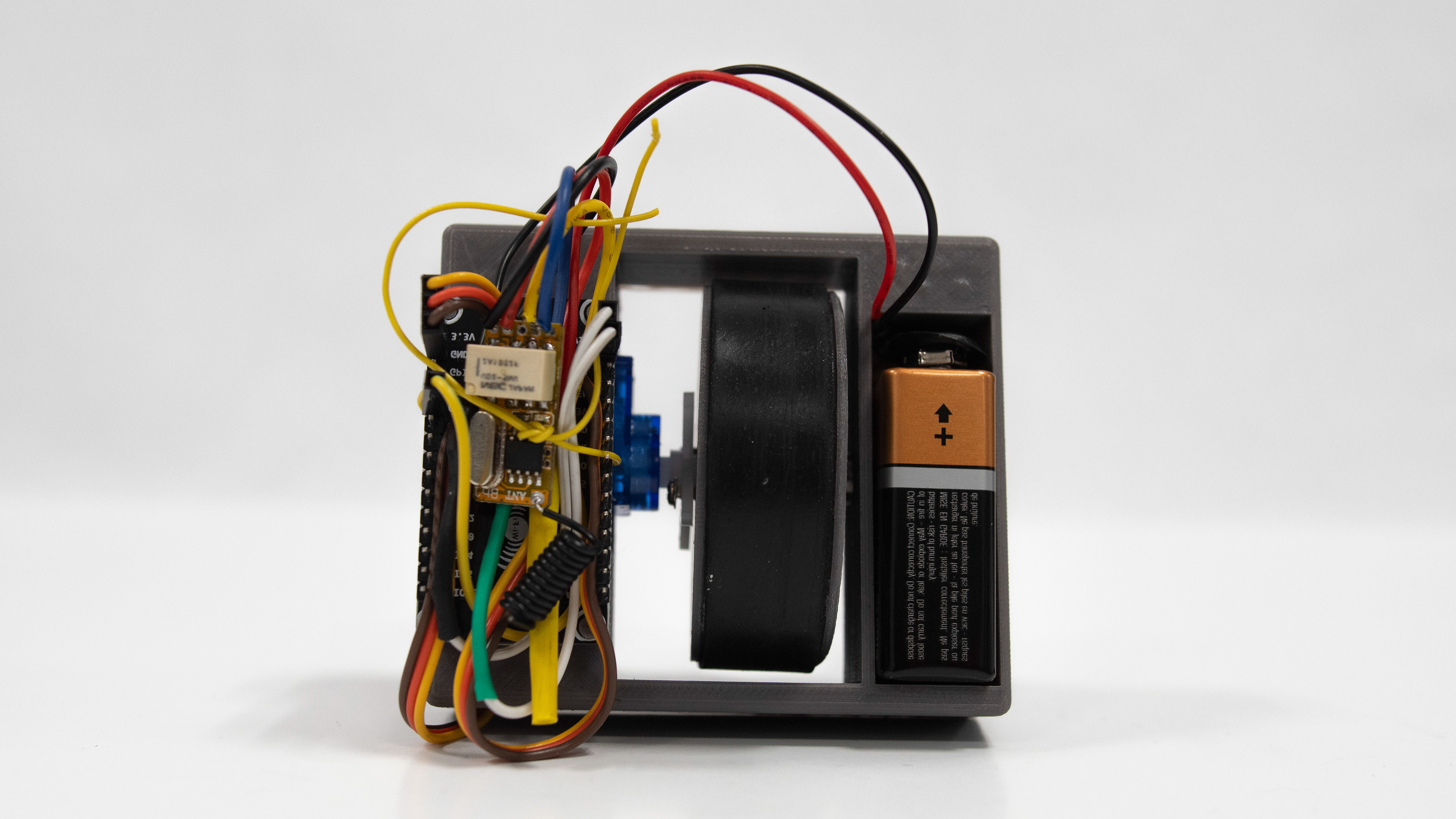
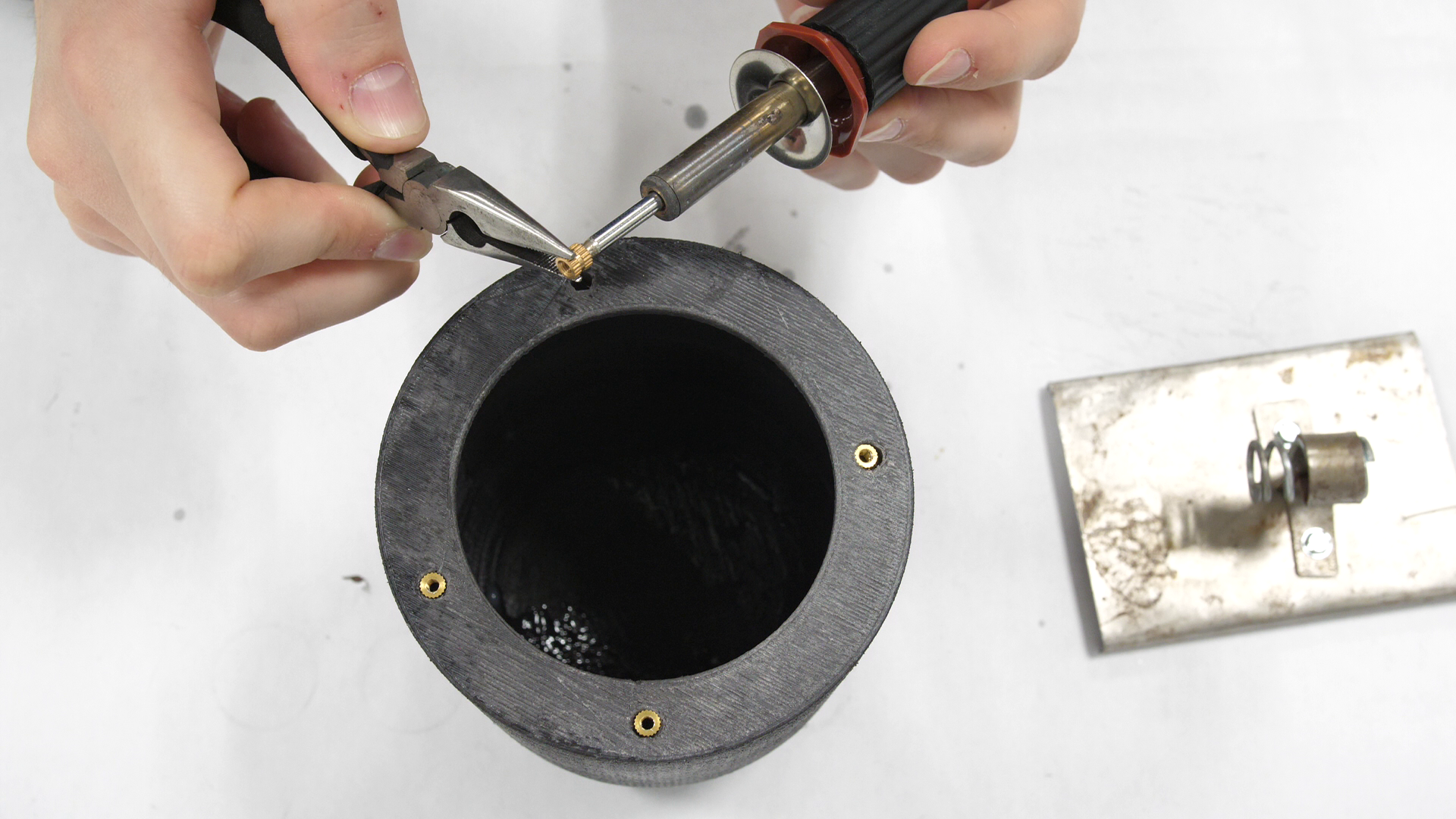
Motorized cart consisting of 3D printed frame and Arduino components to control it
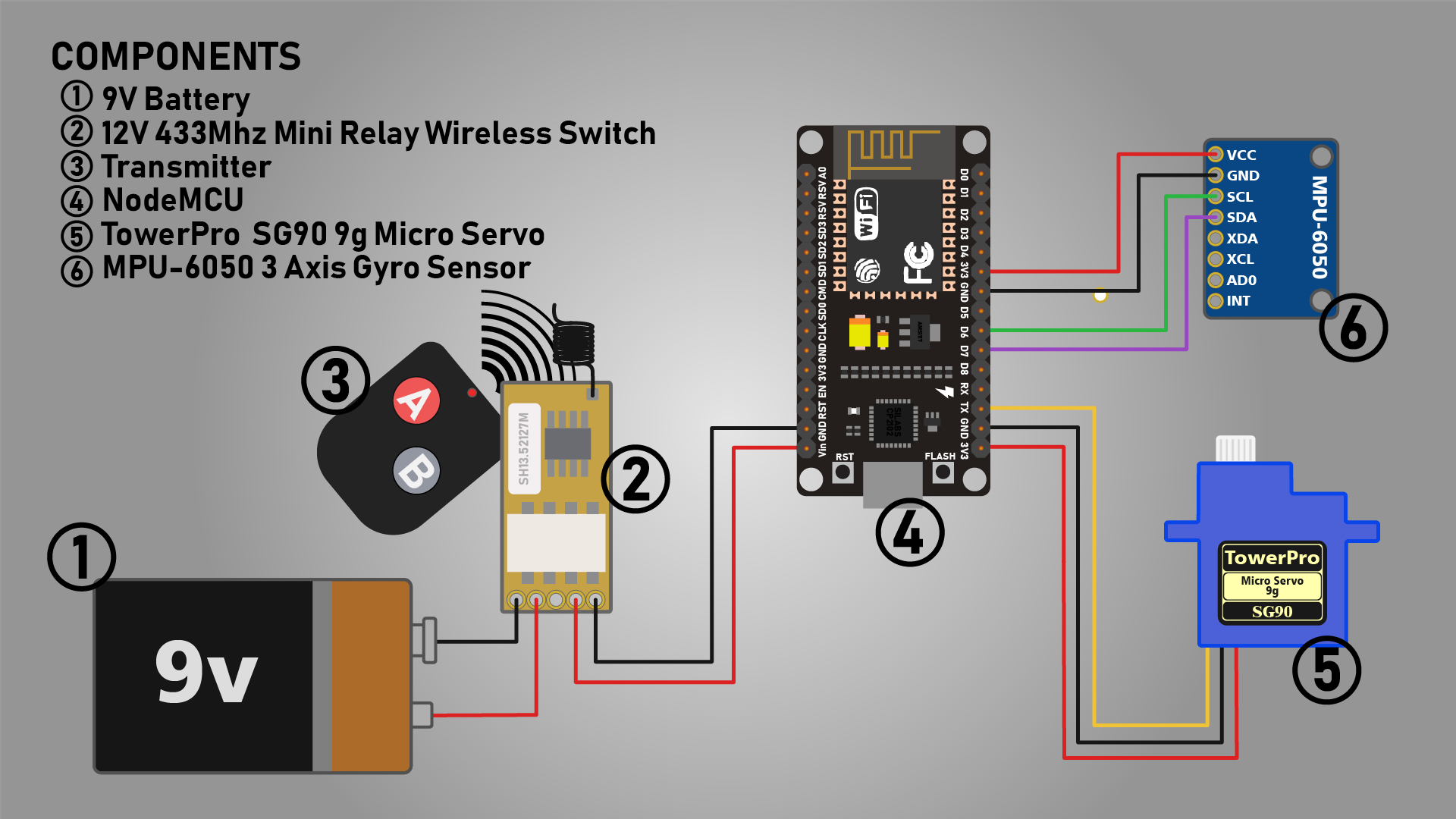
Wiring diagram